Deep Sliding Shapes for Amodal 3D Object Detection in RGB-D Images
Abstract
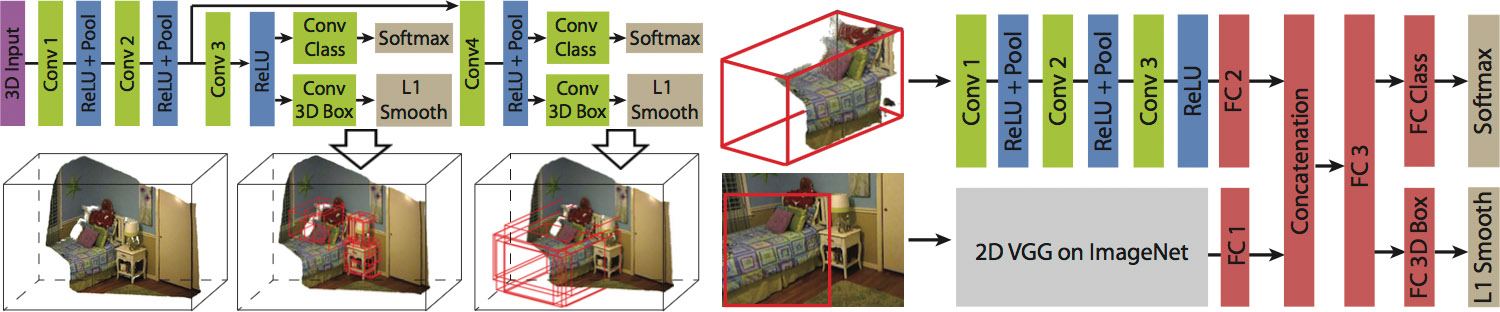
We focus on the task of amodal 3D object detection in RGB-D images, which aims to produce a 3D bounding box of an object in metric form at its full extent. We introduce Deep Sliding Shapes, a 3D ConvNet formulation that takes a 3D volumetric scene from a RGB-D image as input and outputs 3D object bounding boxes. In our approach, we propose the first 3D Region Proposal Network (RPN) to learn objectness from geometric shapes and the first joint Object Recognition Network (ORN) to extract geometric features in 3D and color features in 2D. In particular, we handle objects of various sizes by training an amodal RPN at two different scales and an ORN to regress 3D bounding boxes. Experiments show that our algorithm outperforms the state-of-the-art by 13.8 in mAP and is 200 times faster than the original Sliding Shapes.
Paper
-
S. Song, and J. Xiao.
Deep Sliding Shapes for Amodal 3D Object Detection in RGB-D Images
Proceedings of 29th IEEE Conference on Computer Vision and Pattern Recognition (CVPR2016)
Bibtex
-
@inproceedings{DeepSlidingShapes,
author = {Shuran Song and Jianxiong Xiao},
title = {{D}eep {S}liding {S}hapes for Amodal 3{D} Object Detection in {RGB-D} Images},
booktitle = CVPR,
year = {2016},
}
Video (Download raw video here)
Source Code and Pre-trained Models
- Software Framework: Marvin http://marvin.is
- Source code for the whole system on Github
- Source code for the 3D Selective Search algorithm